
Часы с механической разверткой, Propeller clock, часы Боба Блика – это устройство имеет много названий, но в основу его работы положена разработка 80х годов позапрошлого столетия (1884г) предложенная немецким техником и изобретателем Паулем Нипковым.
Это устройство получило название в честь своего изобретателя – диск Нипкова и послужило основой механического телевидения, которое просуществовало вплоть до 1939 года и было широко распространено в Германии. Диск Нипкова имеет ряд отверстий расположенных по спирали, за диском располагается источник освещения, яркость которого модулируется видеосигналом.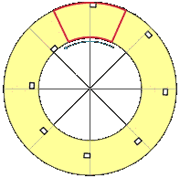
Таким образом каждое отверстие формирует на экране (область отмеченная красным цветом) одну строку изображения.
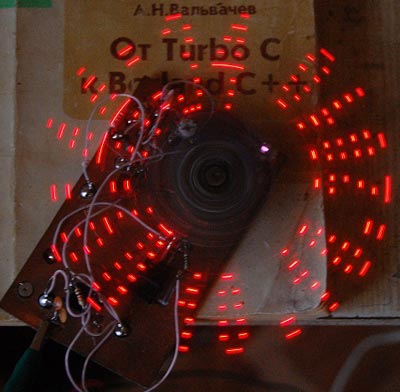
Аналогичным образом работают и часы с механической разверткой. Собственно и название они получили такое из-за близкой родственной связи с принципами развертки изображения механического телевидения.
Используя современную элементную базу построить такие часы довольно просто. Сердцем часов является микроконтроллер фирмы Atmel Attiny2313. Схема подвижной части часов:
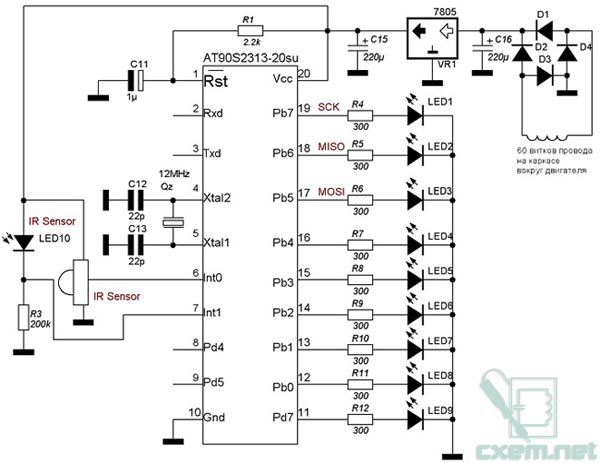
Тактируется схема от встроенного генератора с внешним кварцевым резонатором на 12Мгц, Светодиоды Led1.. Led8 формируют изображение, светодиод led9 не используется и его можно не впаивать. Управляются часы с помощью ИК пульта, посредством приемника (IR sensor), подключенного ко входу внешнего прерывания int0. Фотодиод LED10 подключенный к входу внешнего прерывания int1 используется для синхронизации изображения. Как только на него попадает свет от ИК светодиода, контроллер начинает формирование изображение. Временные интервалы подобраны таким образом, что изображение формируется за один полный оборот. Питание схемы осуществляется с помощью вращающегося трансформатора. Такое решение уменьшает шум всего устройства и устраняет влияние скользящих контактов (при контактной схеме питания) на стабильность оборотов и скорость. Первичная обмотка ВТ (вращающегося трансформатора) наматывается проводом 0.15мм 50 витков непосредственно на двигатель. Для надежности перед намоткой двигатель необходимо изолировать кусочком лакоткани или другим изоляционным материалом. Вторичная обмотка мотается на каркасе из радиокартона тем же проводом 60 витков и приклеивается непосредственно к плате. Диоды D1-D4 можно использовать любые на ток от 0.5А. Конденсаторы С15, С16 выполняют фильтрующую функцию и должны быть рассчитаны на напряжение 16-25в. Как видно схема вращающейся части довольно проста. Схема неподвижной части приведена на рисунке ниже и сложностей так же не представляет.

Она состоит из двух генераторов импульсов выполненных на таймерах NE555. Первый из них предназначен для питания подвижной части часов с помощью вращающегося трансформатора, второй для питания двигателя. Первая схема особенностей не имеет и выполнена по классической схеме генератора на таймере 555. Конденсатор С18 заряжается через резисторы R13, R18, разряжается через резистор R13. Во второй схеме цепи заряда и разряда конденсатора разделены с помощью диодов D5, D6 и резистора R15, что дает возможность регулировать ширину импульса, а соответственно и скорость вращения двигателя. Светодиод Led1 является датчиком синхронизации. Он светится непрерывно и датчик на подвижной части проходя над ним информирует контроллер о необходимости начала формирования изображения. Двигатель в данной конструкции применен от привода лотка любого CD/DVD привода.
Исходный код программы:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 | /*****************************************************This program was produced by theCodeWizardAVR V1.24.8d ProfessionalAutomatic Program Generator© Copyright 1998-2006 Pavel Haiduc, HP InfoTech s.r.l.Project : Propeller ClockVersion : 1.0Date : 05.09.2009Author : Panda Company : ***Comments: Chip type : AT90S2313Clock frequency : 12,000000 MHzMemory model : TinyExternal SRAM size : 0Data Stack size : 32 866 words (84.6% of FLASH)759 words (74,1% of FLASH) 761 words (74,3% of FLASH)*****************************************************/#include #include unsigned char max_days[13] = {0,31,28,31,30,31,30,31,31,30,31,30,31}; unsigned char sec, min, hour, month, day_of_week, day_of_month, tmr_cnt, mode;volatile unsigned char _cmd;unsigned int ms, day, year; #define tmr 250flash const unsigned char font[11][8] = {{0x00, 0x00, 0xFE, 0x81, 0x81, 0xFE, 0x00, 0x00}, // 0{0x00, 0x00, 0x04, 0x02, 0xFF, 0x00, 0x00, 0x00}, // 1{0x80, 0x40, 0xA2, 0x11, 0x89, 0x06, 0x80, 0x00}, // 2{0xC0, 0x00, 0x82, 0x01, 0x89, 0x76, 0x00, 0x00}, // 3{0x00, 0x10, 0x18, 0x14, 0x12, 0xFF, 0x10, 0x00}, // 4{0x40, 0x8F, 0x09, 0x89, 0x09, 0x90, 0x60, 0x00}, // 5{0x00, 0xF0, 0x0C, 0x8A, 0x09, 0x90, 0x60, 0x00}, // 6{0x00, 0x00, 0x01, 0xF1, 0x09, 0x05, 0x03, 0x00}, // 7{0x60, 0x96, 0x09, 0x89, 0x09, 0x96, 0x60, 0x00}, // 8{0x00, 0x00, 0x0E, 0x91, 0x51, 0x3E, 0x00, 0x00}, // 9{0x00, 0x00, 0x00, 0x66, 0x66, 0x00, 0x00, 0x00} // :}; //8x5 font for down parth screenflash const unsigned char d_font[12][5] = {{0x00, 0x1E, 0x21, 0x21, 0x1E}, // 0{0x00, 0x00, 0x3F, 0x10, 0x08}, // 1{0x00, 0x19, 0x25, 0x23, 0x11}, // 2{0x00, 0x16, 0x29, 0x21, 0x12}, // 3{0x00, 0x3F, 0x04, 0x04, 0x4C}, // 4{0x00, 0x26, 0x29, 0x29, 0x39}, // 5{0x00, 0x06, 0x29, 0x29, 0x1E}, // 6{0x00, 0x30, 0x28, 0x27, 0x20}, // 7{0x00, 0x16, 0x29, 0x29, 0x16}, // 8{0x00, 0x18, 0x26, 0x25, 0x18}, // 9 {0x00, 0x03, 0x03, 0x00, 0x00}, //.{0x00, 0x07, 0x06, 0x00, 0x00} // ,}; //********************************************// External Interrupt 1 service routine // Scr for display//********************************************interrupt [EXT_INT1] void ext_int1_isr(void){unsigned char i, s, tmp;char str[10];tmp = hour/10;str[0] = tmp;str[1] = hour-tmp*10;str[2] = 10;tmp = min/10;str[3] = tmp;str[4] = min-tmp*10;str[5] = 10;tmp = sec/10;str[6] = tmp;str[7] = sec-tmp*10; for (s=0; s<8; s++) { for (i=0; i<7; i++) { PORTB = font[str[s]][i]; delay_us(tmr); }; PORTB = 0; delay_us(tmr); }; for (i=0; i<6; i++) delay_us(tmr);//output data//yeartmp = year/10;str[0] = year-tmp*10;str[1] = tmp-tmp/10*10;str[2] = 0;str[3] = 2;str[4] = 10;//month tmp = month/10;str[5] = month-tmp*10;str[6] = tmp;str[7] = 10;//daytmp = day_of_month/10;str[8] = day_of_month-tmp*10;str[9] = tmp;for (s=0; s<10; s++) { for (i=0; i<6; i++) { PORTB = d_font[str[s]][i]; delay_us(tmr); }; PORTB = 0; delay_us(tmr); }; }//**********************************************************************************// External Interrupt 0 service routine receive command from IR remote control unit//**********************************************************************************interrupt [EXT_INT0] void ext_int0_isr(void){unsigned char ppp, pin; unsigned int _tmp, tout;GIMSK = 0; _tmp = 1; for(ppp = 1; ppp<14; ppp++) {delay_us(1200); pin = PIND.2; for (tout = 1400; tout > 0; tout--) if (pin != PIND.2) break; if (tout == 0) {GIMSK = 0x40; //timeout EIFR = 0xC0; return;}; _tmp = _tmp << 1; if (!PIND.2) _tmp++; }; _cmd = _tmp & 0x003F; if ((_cmd & 0x0F) == 1) hour++; //1 slow if ((_cmd & 0x0F) == 2) min++; //2 fast if ((_cmd & 0x0F) == 3) sec=0; //3 if ((_cmd & 0x0F) == 4) //fast {//4 day++; day_of_week++; }; if ((_cmd & 0x0F) == 5) day = day + 31; //5 slow if ((_cmd & 0x0F) == 6) year++; //6 fast if ((_cmd & 0x0F) == 7) day--; //7 if ((_cmd & 0x0F) == 8) {//8 if (day>31) day=day-31; }; if ((_cmd & 0x0F) == 9) {//9 if (year>2000) year--; }; _cmd = 0; EIFR = 0xC0; GIMSK = 0xC0;} //**************************************************// Timer 1 output compare interrupt service routine//**************************************************interrupt [TIM1_COMPA] void timer1_comp_isr(void){// Place your code hereunsigned char vis = 0;ms = ms + 200;if (ms == 1000) {ms = 0; sec++; EIFR = 0xC0; GIMSK = 0xC0;};if (sec >= 60) {sec = 0; min++;};if (min >= 60) {min = 0; hour++;};if (hour >= 24) {hour = 0; day++; day_of_week++;};vis = 0; if ((year-2000)/4*4 == (year-2000)) vis = 1;if (day == 366+vis) {day = 1; year++;}; month = 1; day_of_month = day; if ((day_of_month > 59) & (vis)) day_of_month--;while (day_of_month > max_days[month]){day_of_month -= max_days[month]; month++; }; if (day_of_week == 7) day_of_week = 1; }void main(void){PORTB=0x00;DDRB=0xFF;PORTD=0x04;DDRD=0x00;TCCR1A=0x00;TCCR1B=0x0B;TCNT1H=0x00;TCNT1L=0x00;OCR1AH=0x92;OCR1AL=0x7C;GIMSK=0xC0;MCUCR=0x0D;EIFR=0xC0;TIMSK=0x40;TCCR0B=0x04;TCNT0=0x00;ACSR=0x80;ms = 0;sec = 0;min = 0;hour = 0;day = 1;month = 1;year = 2000;day_of_week = 6; day_of_month = 1;tmr_cnt = 0;mode = 0;#asm("sei")while (1) { };} |
Исходный код программы управления условно можно разбить на четыре части. Это блок инициализации регистров контроллера, блок вывода изображения, блок управления и блок отсчета времени.
Отрисовка изображения производится в процедуре обработки прерывания int1
1 2 3 4 5 6 | //********************************************// External Interrupt 1 service routine // Scr for display//********************************************interrupt [EXT_INT1] void ext_int1_isr(void){ |
Фотодиод на подвижной части проходя над светодиодом неподвижной части формирует импульс, который запускает выполнение процедуры обработки прерывания int1.
В процедуре обработки прерывания int0 производится обработка приема сигналов от ИК пульта дистанционного управления работающего с протоколом RC5.
1 2 3 4 5 | //**********************************************************************************// External Interrupt 0 service routine receive command from IR remote control unit//**********************************************************************************interrupt [EXT_INT0] void ext_int0_isr(void){unsigned char ppp, pin; |
В процедуре обработки прерывания от таймера TMR1 производится отсчет времени и даты.
1 2 3 4 5 | //**************************************************// Timer 1 output compare interrupt service routine//**************************************************interrupt [TIM1_COMPA] void timer1_comp_isr(void){ |
Таймер работает в режиме сравнения. Коэффициент деления для тактирования таймера и значение регистра сравнения подобраны таким образом, что таймер тикает каждые 200мс.
Программа была написана с использованием Code Vision AVR версии 1.24.8d, версия 2.05.5 дает более компактный код.
Fuse Bits необходимо выставить для работы с внешним кварцевым резонатором
SKSEL0 = 1 (галочка снята)
SKSEL1 = 1 (галочка снята)
SKSEL2 = 1 (галочка снята)
SKSEL3 = 1 (галочка снята)
SUT0 = 1 (галочка снята)
SUT1 = 1 (галочка снята)
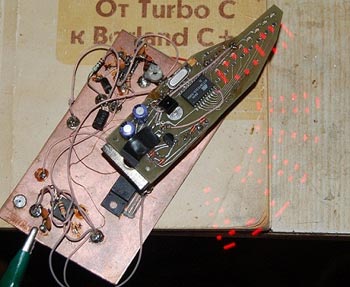
Подвижная часть часов собрана на печатной плате:
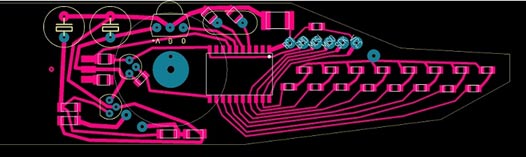
На печатной плате предусмотрено место под датчик температуры ds18b20s, но так как он не используется и программное обеспечение его не поддерживает, место под него остается пустым. Есть вариант ПП без датчика температуры.
Так как печатная плата имеет несимметричную форму, а конструкция должна вращаться с довольно большой скоростью, то необходимо уравновесить плату с помощью груза, роль которого выполняет металлическая пластина закрепленная со стороны фотодиода (левая сторона на рисунке). Подвижная часть часов после сборки должна быть тщательно отбалансирована, иначе неизбежно будут возникать биения и вибрации.
Прикрепленные файлы:
- propeller_clock.rar (35 Кб)




0 Комментарии